Learn
启动时屏蔽RobotStudio
“C:\Program Files (x86)\ABB\RobotStudio 2021\Bin\RobotStudio.exe” /DefaultPowerPac:PickMasterPowerPac.rsaddin /headless
PackML
OMAC(Open ModularArchitecture Controllers) Packaging Machine Language (PackML)
ppa
ppa - Pick and Place Application
pm
Pick Master
doTrigVis1 VS c1TrigVis
doTrigVis1 - LocalIO c1TrigVis - CTM
Pick and Place Trig
PickPlace -> Loop -> SafeStop(ExitCycle) -> PickPlaceSeq(Pick -> Place) Pick: GetItmTgt -> VacuumAct1, SimAttach1 -> Ack Place: GetItmTgt -> VacuumRev1, VacuumOff1, SimDetach1 -> Ack
SetTriggs
Real Controller Virtual Controller -> SetSimulatedTriggs
PMPP Task Frame
PMPP中默认添加的机器人是倒挂的,倒挂机器人会自动把绕X轴旋转180度的四元数设置到机器人的BaseFrame中。但是如果用户再在PMPP中选择机器人的角度,或者设置机器人的位置,此时会把手动移动和旋转的数据设置在RobotStudio的Task Frame中。为什么这么做?
Pick Time and Place Time
延长Pick Time和Place Time都会是吸盘真空时间延长,Pick Time会延长抓取时的真空时间,抓手会和传送链同步Pick Time时长,在此期间真空信号激活,Place Time会延长放置的时间,此时抓手会和传送链同步Place Time时长,在此期间真空信号同样激活
Vacuum Activation
Vacuum Activation用于控制在机器人达到抓取点前,提前开真空。

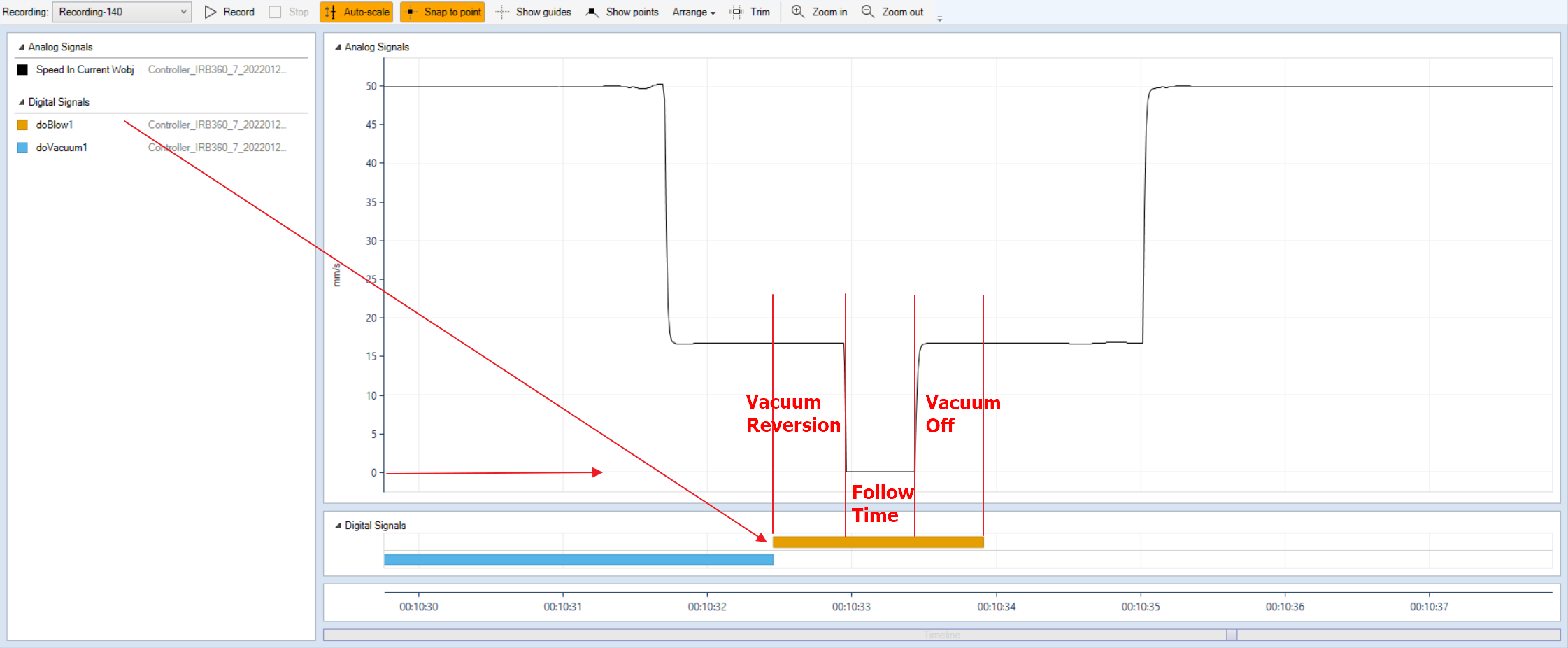
Vacuum Reversion & Vacuum Off
Enter/Exit
Enter
机器人GetItmTgt时监控的是item的中心点位,并不是item几何模型的边缘,只有当item的中心点位到达Enter时,机器人才会去抓。
Exit
机器人GetItmTgt时监控的是item的中心点位,并不是item几何模型的边缘,当item的中心点位移除Exit时,机器人就不会去抓了。