Conveyor Tracking
传送带工作区域划分
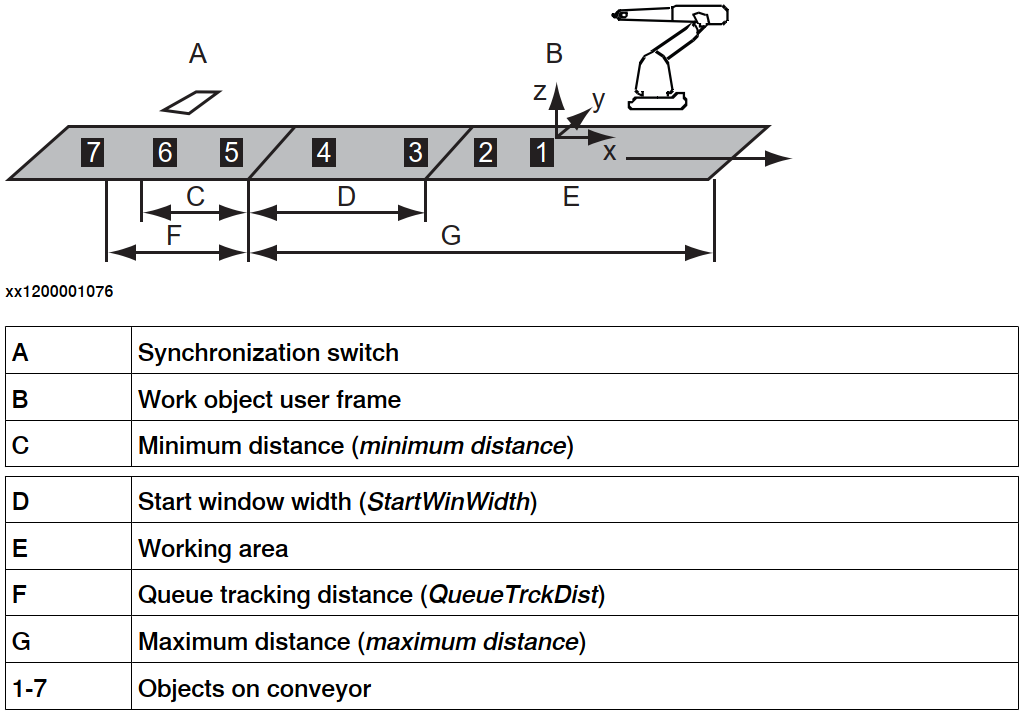
传送带上共有四个区域:
- 未进入Synchronization switch。(如下图中产品7所在位置)
- 进入Synchronization switch,但是未进入机器人监控范围区域,如下图产品5和6,该区域的产品会被加入传送带跟踪队列,但如果机器人请求数据,是不会发送给机器人的,因为在机器人的运动区域外。
- 进入机器人监控区域,如下图产品4和3,此时一旦机器人请求数据,就会立刻收到该区域的产品信息。
- 离开机器人监控区域,如下图的2和1,该区域的产品如果已经被机器人跟踪抓取(在第三步获取到数据),产品会被抓取和放置。但是如果产品没有被机器人跟踪,那么这个产品会被放弃。
- Queue tracking distance (QueueTrckDist),这个距离对于Pick Master Twin,应该对应着IO Sensor的检测点到Work Area的Enter点位置。
- Start window width (StartWinWidth),这个距离对于PickMaster Twin,应该对应着WorkArea的Exit-Enter的距离。应该不是对应着Start Stop点,因为Start和Stop点按我理解只用于传送带的启停,不用于区分WorkArea的跟踪范围大小。
Activation and Deactivation only done from Rapid
RW6.13的Motion -> Mechanical Unit中有一个新的设置:Activation and Deactivation only done from Rapid,该设置可以确保程序在移动指针时,外轴不会被自动激活或者停用
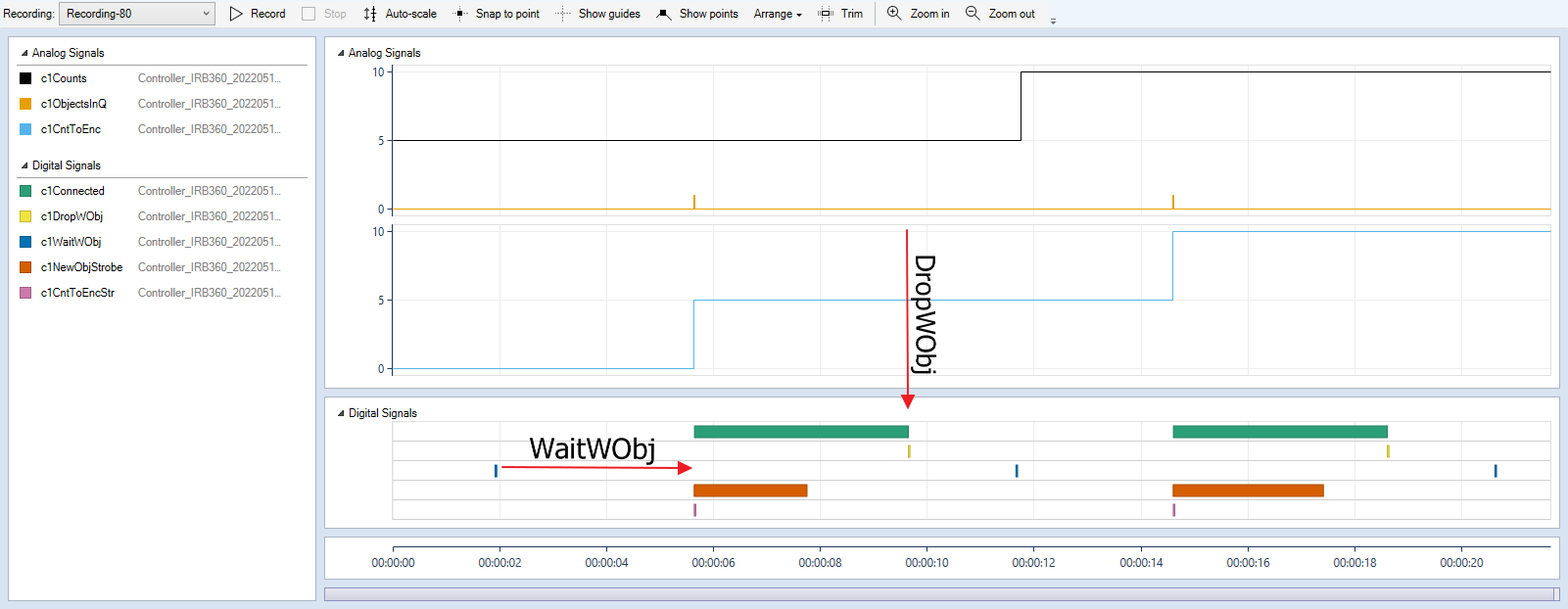
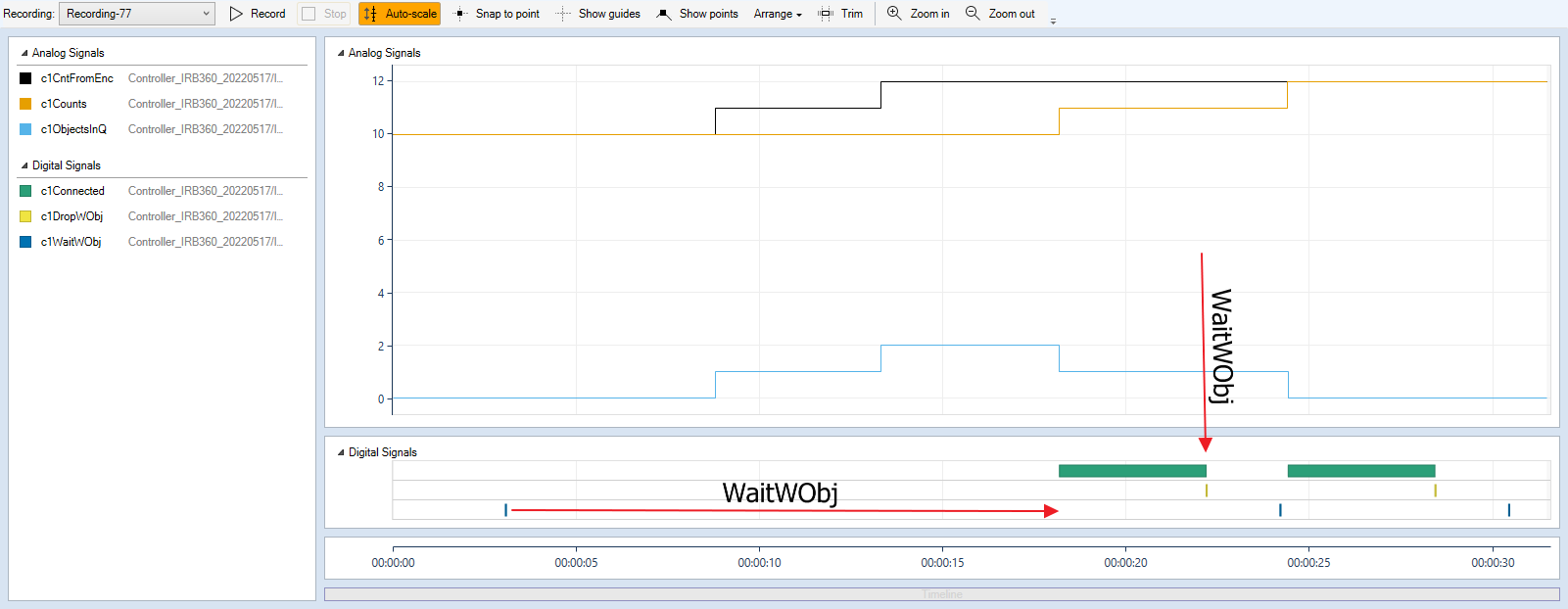
WaitWObj wobjCNV1 & DropWObj wobjCNV1
c1CntFromEnc自动触发
每次c1CntFromEnc变化,都会导致c1ObjectsInQ加1,同时机器人内部有一个队列,存储着每一次的变化值,当使用WaitWObj wobjCNV1 指令时,会获取队列中存储的最小c1CntFromEnc值,并关联到CNV1的坐标上,也就是用该最小的c1CntFromEnc值作为CNV1传送带的原点或零位,可以从示教器的Job界面看出,传送带的坐标为c1Counts-c1CntFromEnc,当运行DropWObj时,CNV1的坐标会变为0,注意只有真正DropWObj才会变为0,如果之前没有WaitWObj,那么重复的DropWObj不会改变传送带的坐标位置值。
c1NewObjStrobe手动触发
当手动触发c1NewObjStrobe信号时,会删除队列里所有数据,然后把当前的c1Counts值赋值到c1CntToEnc,同时发出脉冲信号c1CntToEncStr。生产wobj供WaitWObj指令返回。