IRB360
IRB360_8_1130
- 机器人在0位时,TCP的坐标为[0,0,-960.39]
- P5实验室传送带表面距离机器人的BaseFrame原点高度大约为1100mm
- 东侧传送带距离机器人BaseFrame原点的侧向距离分别为90,140,390,440,所以传送带整体宽度为440-90=350,送料带宽度为390-140=250,送料带边距为140-90=50mm
- 西侧传送带距离机器人BaseFrame原点的侧向距离分别为320,370,620,670
- 两侧传送带偏心320-90=230mm
- 虚拟工作站中的传送带高度为500mm,机器人太高1600mm,所以机器人距离传送带的高度为1100mm,实际站应该按照这个配置。
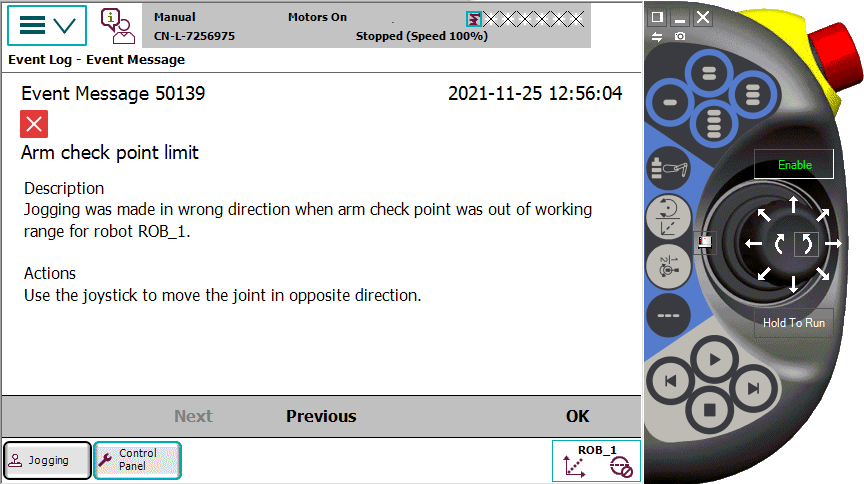
Arm check point limit
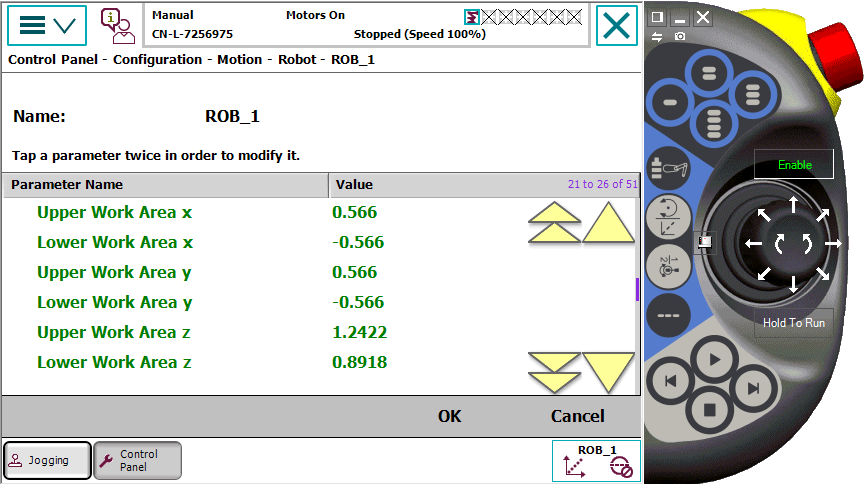
Arm check point limit是机器人运行到设置的运行区域边界时才会报的错误,不会提前报。可以在机器人的upperworkarea和lowerworkarea里设置,该坐标基于机器人的基座标,非大地坐标系。