PC SDK
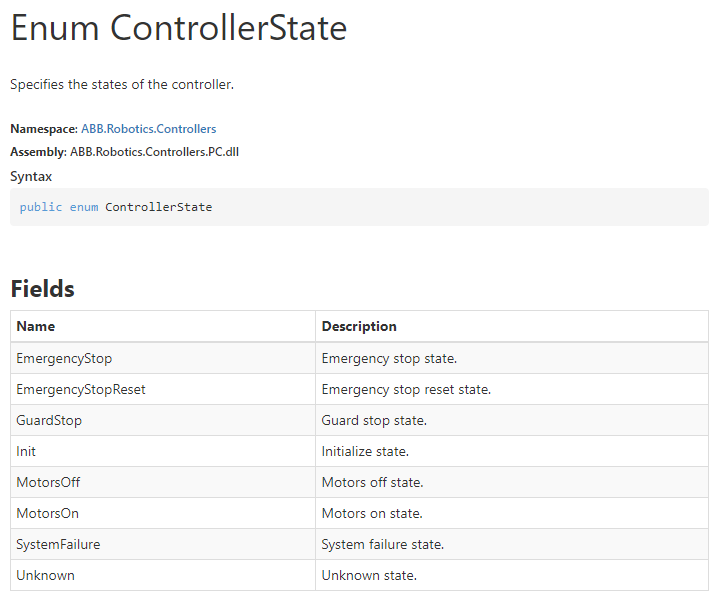
ControllerState
- init: The robot is starting up. It will shift to state motors off when it has started.
- motoroff: The robot is in a standby state where there is no power to the robot’s motors. The state has to be shifted to motors on before the robot can move.
- motoron: The robot is ready to move, either by jogging or by running programs.
- guardstop: The robot is stopped because the safety runchain is opened. For instance, a door to the robot’s cell might be open.
- emergencystop: The robot is stopped because emergency stop was activated.
- emergencystopreset: The robot is ready to leave emergency stop state. The emergency stop is no longer activated, but the state transition isn’t yet confirmed.
- sysfail: The robot is in a system failure state. Restart required.
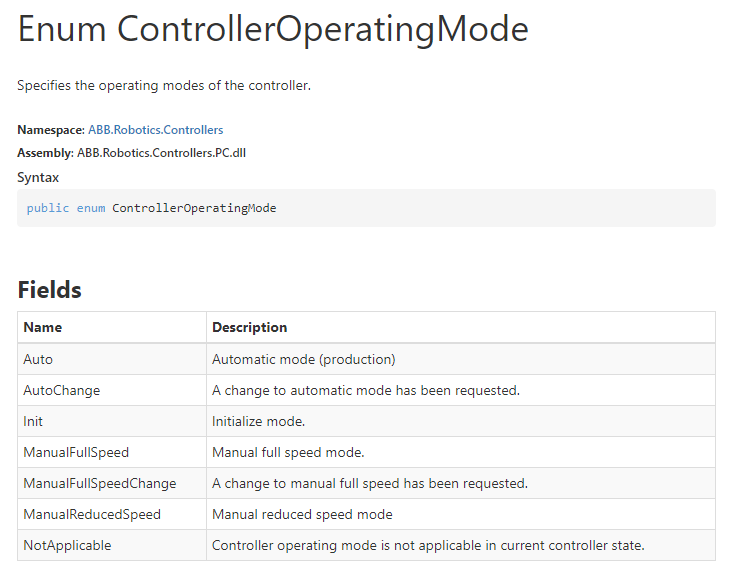
ControllerOperatingMode
- INIT : State init
- AUTO_CH : State change request for automatic mode
- MANF_CH : State change request for manual mode & full speed
- MANR : State manual mode & reduced speed
- MANF : State manual mode & full speed
- AUTO : State automatic mode
- UNDEF : Undefined
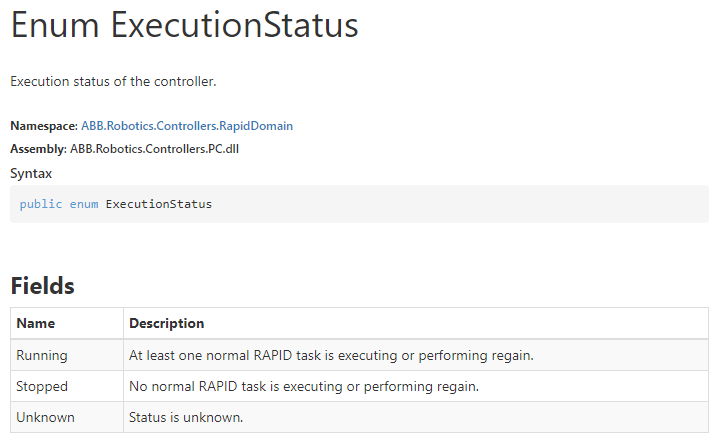
ExecutionStatus
ctrlexecstate Rapid execution state {running | stopped}
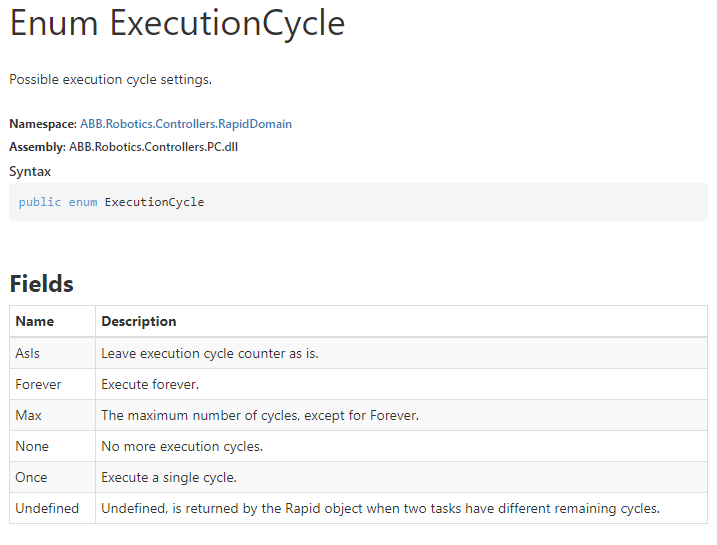
ExecutionCycle
cycle Current run mode { forever | asis | once | oncedone }
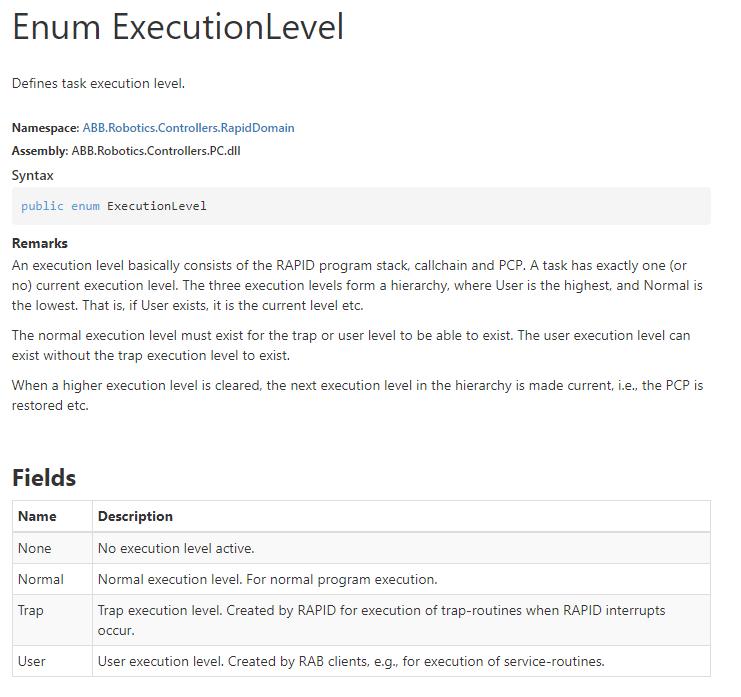
ExecutionLevel
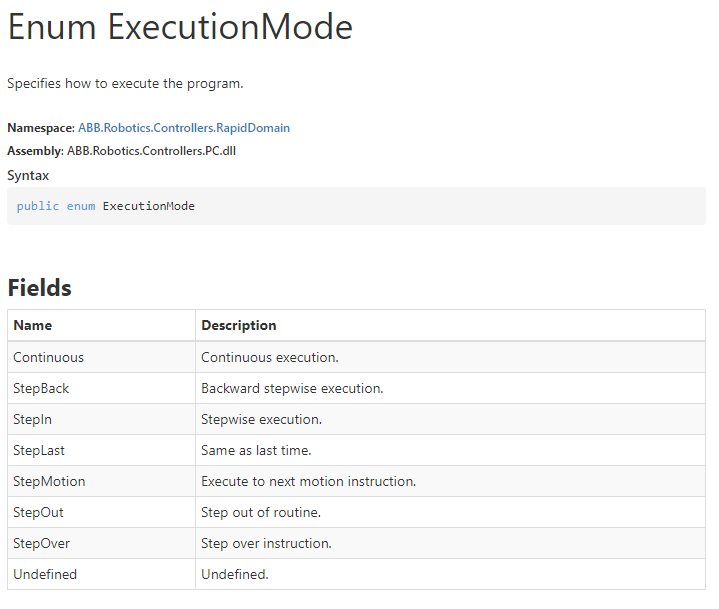
ExecutionMode
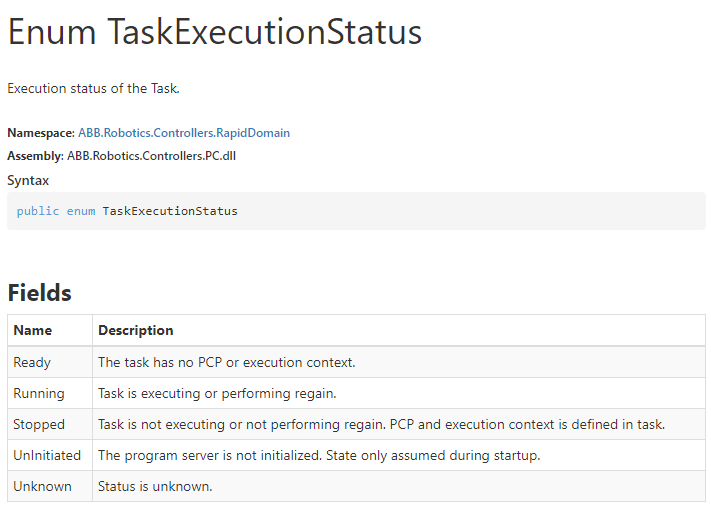
TaskExecutionStatus
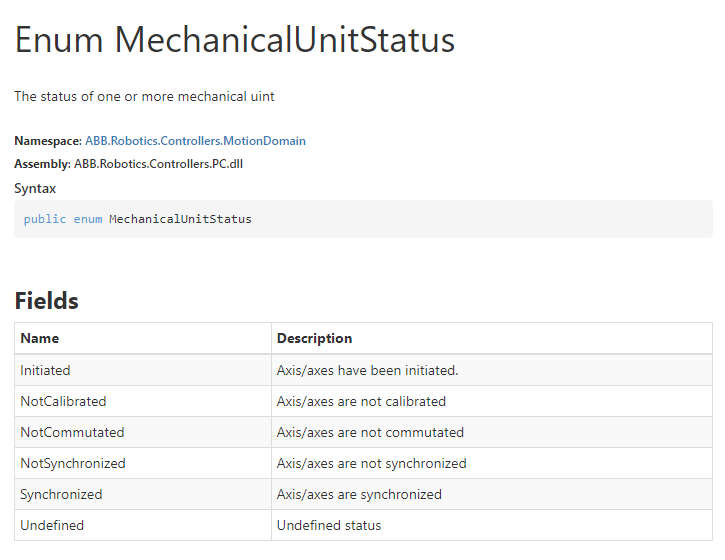
MechanicalUnitStatus
PCSDK Redistributable
A PC SDK application requires RobotStudio or ABB Robot Communications Runtime to connect to a controller in run-time. The latter is included in the RobotStudio installation. For the PC SDK to establish a connection either RobotStudio or Robot Communications Runtime must be installed on the PC hosting the PC SDK application. Robot Communications Runtime can be installed from
- RobotCommunicationRuntime安装目录:C:\Program Files (x86)\Common Files\ABB Industrial IT\Robotics IT,如果单独安装RobotCommunicationRuntime而不安装PCSDK,会多出一个文件夹C:\Program Files (x86)\Common Files\ABB Industrial IT\Robotics IT\RobVCCommon
- PCSDK安装目录:C:\Program Files (x86)\ABB\SDK\PCSDK 2022,安装PCSDK会自动安装RobotCommunicationRuntime,但是不会生成C:\Program Files (x86)\Common Files\ABB Industrial IT\Robotics IT\RobVCCommon目录下文件,原因未知。