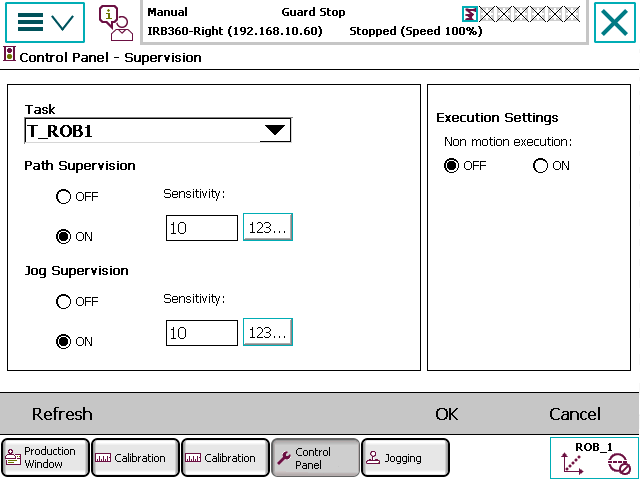
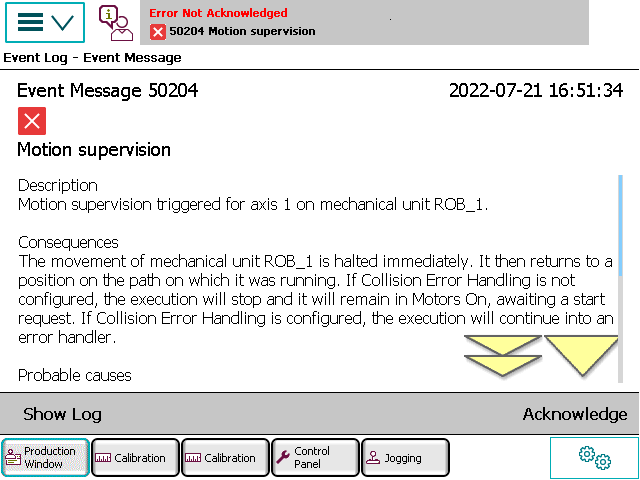
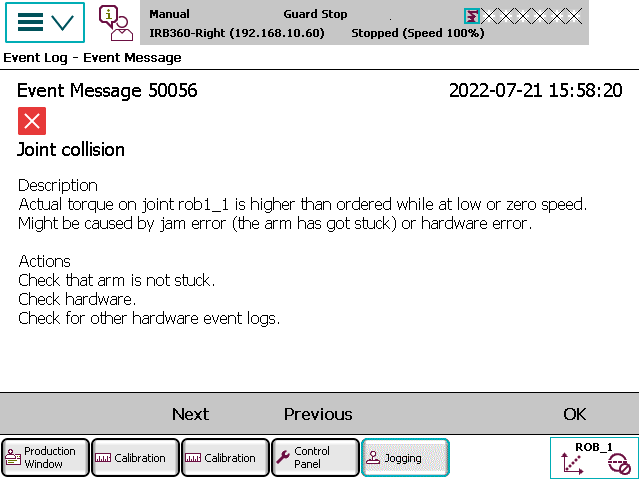
Certificate Jul 22, 2022 • Michael 碰撞检测灵敏度设置 取值范围从1~300,默认为100,数字越小,机器人越敏感。 碰撞检测报警 碰撞检测报警需要选项613-1 Collision Detection。 关节碰撞报警 当机器人没有613-1 Collision Detection时,此时机器人发生碰撞会触发JointCollision错误。所以JointCollision是比MotionSupervision报警更剧烈的碰撞。