CTM
c1TrigVis = Digout1:Setpoint, DO
Camera trig output signal,当c1TrigAutoMode为0时,需要程序手动触发,当c1TrigAutoMode为1时,由CTM板自动触发。自动触发时,需要告知CTM板监控哪个编码器cXTrigAutoEncNo,编码器数值的间隔cXTrigAutoDist是多少。
c1TrigAutoMode = Cam1:Connect, DO
Enables auto mode trigger, 当为1时,通过编码器等间距触发信号,貌似信号触发是CTM自动的,不是有RobotWare或PickWare监控编码器的数量实现的。
c1TrigAutoDist = Cam1:Interval, GO
Counter interval between auto mode trig pulses,编码器间距触发信号的数量
c1TrigAutoEncNo = Cam1Enc:DeviceNo, GO
Supervised encoder (1,2,3 or 4) for auto mode trigger. 编码器的端子号,猜测自动触发Trig信号是CTM板自动实现的,所以需要告诉CTM板监控哪个编码器。
c1SoftSync = Sync1Enc1:SyncTrig, DO
Simulates activation of the sensor sync input signal. 这个不是CTM板是的实际信号,但是和实际的相机返回信号具有同样的功能。CTM实际是否被触发由两路信号来决定,一路是实际的硬件信号,一路是虚拟的c1SoftSync信号,两个信号都可以实现该功能。
c1CntFromEnc = Sync1Enc1:Value, GI
Encoder count at activation of the sensor sync signal. 编码器上一个触发信号的编码数据。比c1Counts小。This 32-bit GI signal indicates the location (counter value) of the latest detected object. The signal is updated at every object detection. The signal can only detect new values when the conveyor is moving. To create a new object when the conveyor is not moving it is required to pulse cxNewObjStrobe. A new object will be created at the current conveyor position.
! Connect a trap routine to the detection of new objects on the conveyor
CONNECT NewObj WITH NewObjOnConvey;
ISignalGI c1CntFromEnc, NewObj;
TRAP NewObjOnConvey
! A new object is detected; Read its position from input group signal
ObjectPosition := GInputDnum(c1CntFromEnc);
RETURN;
ENDTRAP
c1Counts = enc1:position, GI
Current position (number of encoder counts). 编码器的当前值。
c1CountsPerSec = enc1:velocity, GI
Current speed (encoder counts per second)
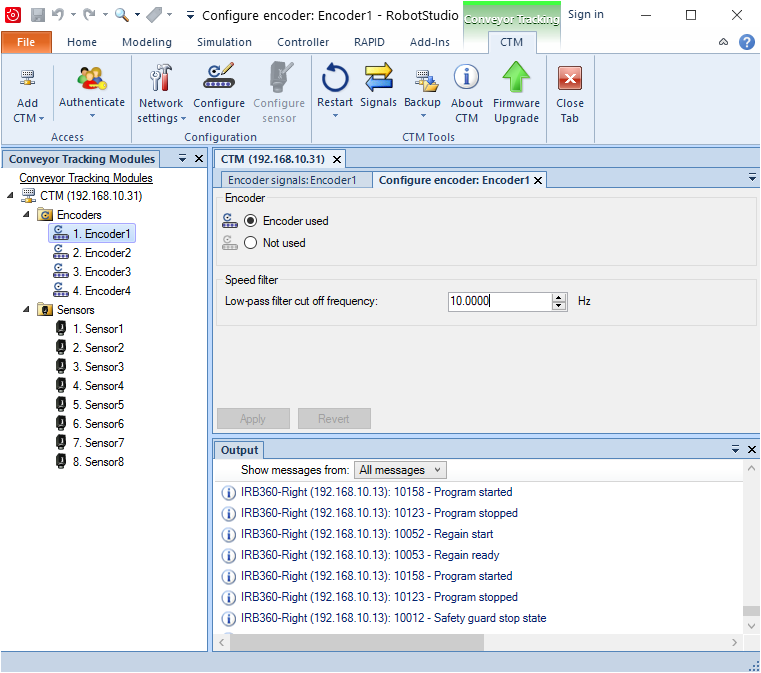
c1SpeedBandWidth = e1_SpeedBandWidth:SetPoint, GI
Speed filter bandwidth (HZ), An encoder can be configured as used or not used. This change in configuration will affect how the encoder is displayed in the tree view browser. To tune the encoder speed filtering, you can define the Low-pass filter cut off frequency in the Speed filter section. For DSQC2000: The low-pass filter is to smoothen the speed-calculation generated by CTM based on the encoder-frequency. By default, it is configured as a 2nd order IIR-filter with a cut-off frequency of 10 Hz, so signal-noise is reduced for disturbances < ~100 ms.
Error
机器人配置中,c5CntFromEnc (Sync1Enc1:Value)和c5SoftSync (Sync1Enc1:SyncTrig)这两个信号的Device Mapping可能是错的,需要改为Sync5Enc1:Value和Sync5Enc1:SyncTrig